
Productes

paletitzador automàtic de pòrtic de caixa de cartró
Descripció breu:
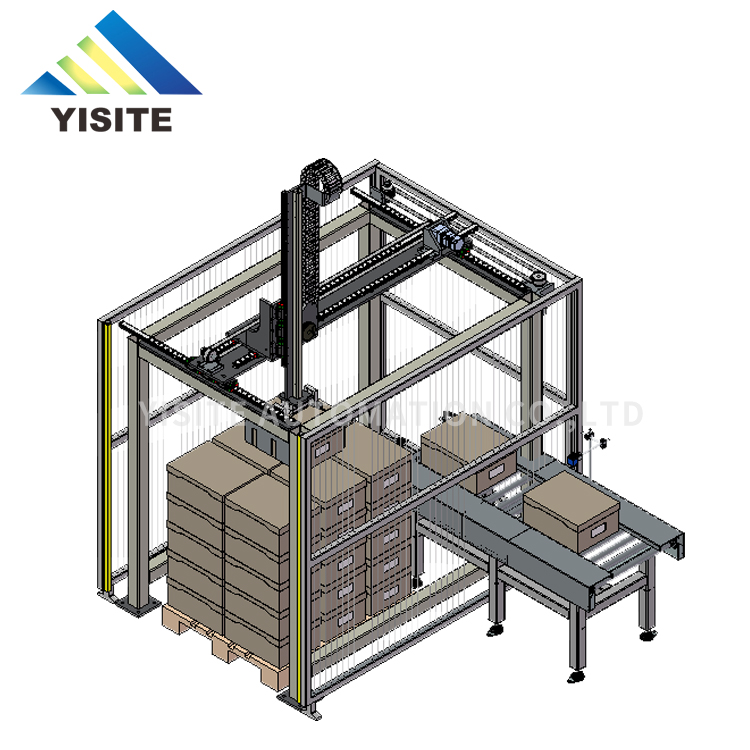
Introducció al producte del paletitzador automàtic de pòrtic de caixa de cartró: la unitat principal del paletitzador es compon d'un carro que pot viatjar cap endavant i cap enrere, un marc i una plataforma portadora que es pot aixecar i abaixar. La mida i la fixació es poden personalitzar.
El paletitzador automàtic de pòrtic de caixa de cartró té un disseny especial d'adherència pneumàtica, pressió ajustable, equipat amb vàlvula d'amortiment de pressió, de manera que l'acció d'agafada equipada amb mecanisme d'inducció pugui percebre automàticament l'objecte i informar el centre de control per a la presa de l'objecte.

sobre nosaltres

Som un fabricant professional d'equips d'automatització personalitzats. Els nostres productes inclouen despaletitzador, màquina d'embalatge de recollida i col·locació, paletitzador, aplicació d'integració de robots, manipuladors de càrrega i descàrrega, conformació de cartró, segellat de cartró, dispensador de palets, màquina d'embolcall i altres solucions d'automatització per a la línia de producció d'envasos de fons.
La nostra àrea de fàbrica és d'uns 3.500 metres quadrats. L'equip tècnic bàsic té una mitjana de 5-10 anys d'experiència en automatització mecànica, inclosos 2 enginyers de disseny mecànic. 1 enginyer de programació, 8 treballadors de muntatge, 4 depuradors postvenda i altres 10 treballadors
El nostre principi és "el client primer, la qualitat primer, la reputació primer", sempre ajudem els nostres clients a "augmentar la capacitat de producció, reduir costos i millorar la qualitat", ens esforcem per convertir-nos en un proveïdor líder en la indústria de l'automatització de maquinària.
Manipulador d'apilament de cartró totalment automàtic Truss XYZ
1. Composició de la màquina apiladora
La màquina paletitzadora es compon d'un marc d'instal·lació, un sistema de posicionament, un sistema d'accionament servo, un sistema de control, un sistema de control i distribució elèctric, un dispositiu de protecció de seguretat, etc., equipat amb un sistema de posicionament automàtic d'alimentació. (Sistema de subministrament automàtic de pila opcional)
2. Bastidor de muntatge de la màquina apiladora
Com que la velocitat de moviment de l'apilador és molt ràpida, l'estat inicial té un gran impacte en el marc de muntatge. El marc d'instal·lació ha de ser molt rígid per garantir el funcionament estable de l'apilament, de manera que hem dissenyat l'estructura del marc d'acer soldat com el marc de suport.
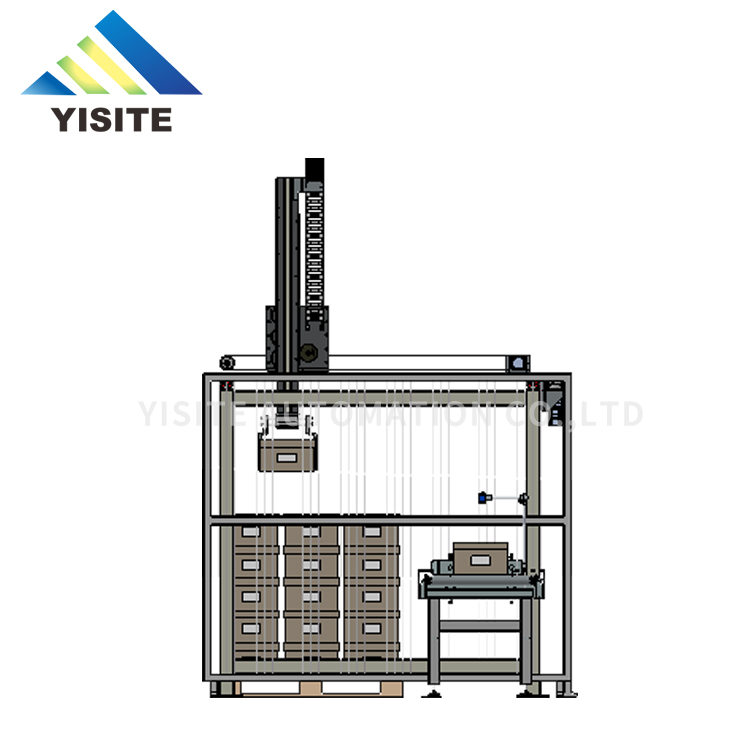
3. Sistema de posicionament de la màquina paletitzadora apiladora
El sistema de posicionament de l'apilador és el nucli de tot l'equip, és el producte de l'empresa Yaskawa (Japó), la velocitat de moviment ràpida i la precisió de repetició és alta, es seleccionen tres coordenades X, Y, Z per a la transmissió sincrònica del cinturó de dents, coordenada única. La precisió de posicionament repetida és de 0,1 mm, velocitat de moviment de línia ràpida: 1000 mm/s. L'eix X és un sistema de posicionament únic amb una longitud única de 3000 mm i un abast de 1935 mm. El transmissor síncron garanteix el moviment sincrònic dels dos sistemes de posicionament i és impulsat per un servomotor de 1500 W. Per fer coincidir el parell de conducció i la inèrcia, hi ha un reductor d'engranatge planetari d'alta precisió.
L'eix Y utilitza un sistema de posicionament dual. El motiu pel qual la unitat de posicionament amb una secció transversal tan gran és principalment perquè l'eix Y és un suport de doble extrem amb l'estructura de suspensió mitjana. Si la secció transversal seleccionada no és suficient, no es garantirà l'estabilitat del moviment del robot i el robot tremolarà quan es mou a gran velocitat. S'utilitzen dues unitats de posicionament una al costat de l'altra per tallar l'eix Z al mig i equilibrar-lo. la càrrega bé. Aquest mode d'instal·lació té una molt bona estabilitat. Els dos sistemes de posicionament estan accionats per un servomotor de 1500 W, equipat amb un reductor planetari d'alta precisió per fer coincidir el parell d'accionament i la inèrcia.
El sistema de posicionament de l'eix Z és ferm i estable. El producte generalment té el control lliscant fix i el moviment general cap amunt i cap avall. El servomotor necessita millorar l'objecte ràpidament, que ha de superar una gran força de gravetat i acceleració i necessita una major potència. .A la pràctica, hem escollit un servomotor de 2000 W, equipat amb un reductor planetari d'alta precisió. L'eix A és l'eix de rotació.
4. Sistema de servoaccionament
La màquina manipuladora d'apilament utilitza un servomotor amb funció digital. Cada eix del motor està equipat amb un servomotor i un reductor, quatre servomotors i quatre reductors, inclòs el motor vertical amb servomotor de bloqueig.
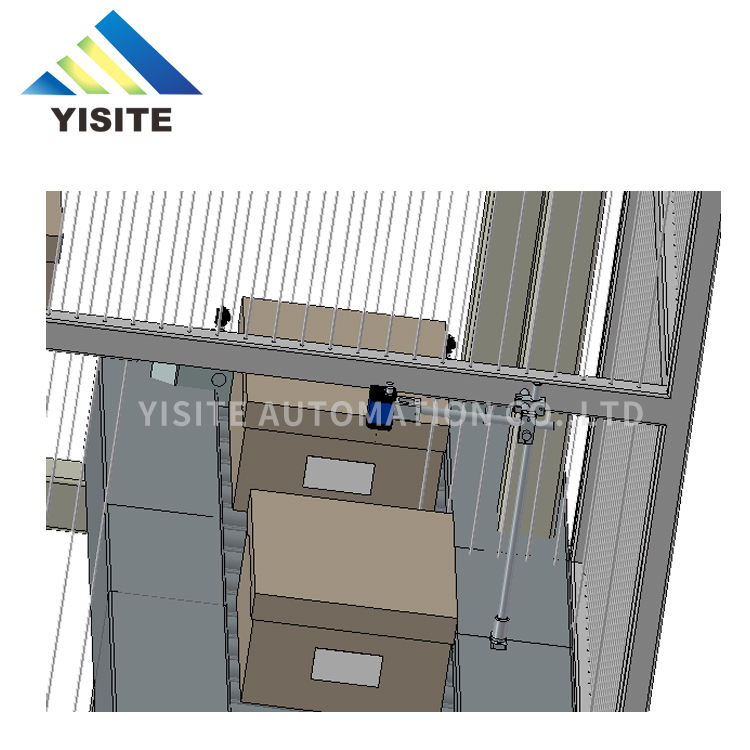
5. Empunyadura de l'apilador
L'apilament amb un disseny especial d'adherència pneumàtica, pressió ajustable, equipat amb vàlvula d'amortiment de pressió, de manera que l'acció d'agafada equipada amb mecanisme d'inducció, pugui percebre automàticament l'objecte i informar el centre de control per a la presa de l'objecte.
6, sistema de control
El sistema de control consta d'un gran PLC i una pantalla tàctil. El sistema té potents capacitats de programació. Amb diferents models de paletització, el sistema pot preestablir una varietat de programes d'artefactes, i per substituir el programa corresponent es pot operar a la pantalla tàctil.
7, dispositiu de seguretat
La màquina té una funció d'avís i d'alarma d'error, i cada falla pot reflectir amb precisió la ubicació específica, fàcil i ràpid d'eliminar errors, incloent-hi principalment: funció de protecció contra col·lisions del robot; detecció de la instal·lació de la peça al lloc; protecció de seguretat de pantalla lleugera.
Paràmetres tècnics
1. Model de màquina: YST-MD1500
2. Capacitat d'apilament: 200-500 caixes / H
3. Marc: SS41 (tractament plàstic d'injecció d'acer A3) eix S45C de rodament d'acer
4. Potència: CA, 3 fases, 380V, 9KW 50HZ
5. Consum d'aire: 500NL/MIN (ús d'aire: 5-6kg/cm2)
6. Dimensions de l'equip: (L) 3500 mm (W) 2250 mm (H) 2800 mm (depèn del disseny real de la disposició)
7. Pes de l'equip: 1.500 kg


Configuració de l'avantatge principal
1. Servomotor marca Yaskawa
2. Reductor de velocitat de la marca Taiwan
3. Mitsubishi (Japó) PLC
4. A Schneider s'han d'utilitzar el contactor i els interruptors
5. Sensor fotoelèctric Omron
6. Acció de visualització de control d'interfície i estat d'alarma i funció d'alarma
7. Convertidor de freqüència de la marca Yaskawa
8. El marc i els panells laterals estan fets d'acer al carboni
9. Elements pneumàtics Taiwan AirTac
10. Sucker de la marca italiana PIAB









