
El robot de pòrtic consta d'un marc de columna, un component de l'eix X, un component de l'eix Y, un component de l'eix Z, un accessori i una caixa de control.
És un equip industrial totalment automàtic basat en el sistema de coordenades tridimensionals rectangular X, Y, Z, que pot ajustar la posició de la peça o realitzar el moviment de la trajectòria de la peça. El seu nucli de control s'implementa mitjançant controladors industrials.
El controlador analitza i processa diversos senyals d'entrada, fa judicis lògics i després emet ordres d'execució a cada component de sortida per completar el moviment conjunt entre els eixos X, Y i Z i realitzar un conjunt complet de processos d'operació totalment automàtics.
S'utilitza en el muntatge i el transport de productes, sistemes de transport i llocs de treball no tripulats. Es pot utilitzar com a equip perifèric important per a l'emmagatzematge temporal i la logística i es pot combinar de manera flexible amb l'equip amfitrió per facilitar-ne l'ús. Aplicació Indústries implicades en: muntatge final, sub-muntatge, processament, proves, depuració i transport de productes, etc.
Les característiques del producte són per ajudar els clients a resoldre els problemes de baixa eficiència o riscos de manipulació elevats en diversos tipus de manipulació de materials, per reduir de manera còmoda i ràpida els riscos de manipulació, estalviar temps, esforç, estalviar mà d'obra i fins i tot substituir mà d'obra.
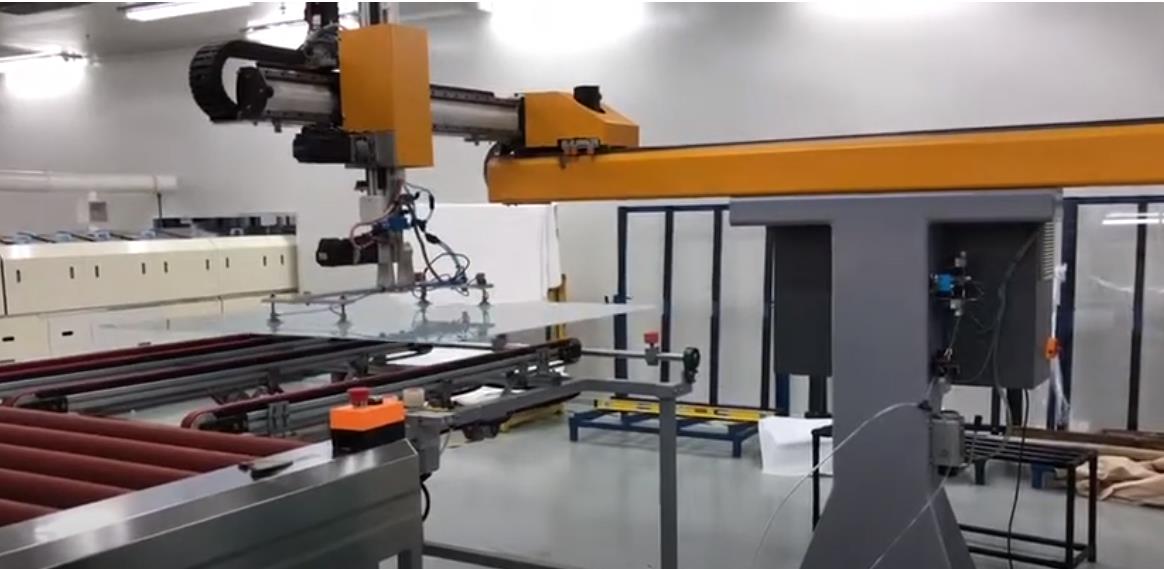
 Aquest dispositiu de manipulació d'encavallada de pòrtic per a vidre inclou columnes i bigues transversals instal·lades a les columnes. Les bigues transversals s'instal·len amb rails lliscants. Els rails lliscants s'instal·len amb un dispositiu de lliscament transversal. El dispositiu de lliscament transversal s'instal·la amb un dispositiu de lliscament vertical i un dispositiu de ventosa pneumàtica. Es pot adonar que el mecanisme de transport es mou en un punt fix de l'espai tridimensional, aspira el vidre a través de la ventosa, primer es mou lateralment a l'eix X, després gira 90 graus fins a la posició designada i després mou cap amunt. i cap avall a l'eix Y. Després d'arribar a la posició establerta, deixeu anar el vidre i col·loqueu-lo al prestatge de vidre. L'estabilitat estructural de tot el dispositiu és molt alta, la qual cosa millora molt la manipulació. eficiència.
Aquest dispositiu de manipulació d'encavallada de pòrtic per a vidre inclou columnes i bigues transversals instal·lades a les columnes. Les bigues transversals s'instal·len amb rails lliscants. Els rails lliscants s'instal·len amb un dispositiu de lliscament transversal. El dispositiu de lliscament transversal s'instal·la amb un dispositiu de lliscament vertical i un dispositiu de ventosa pneumàtica. Es pot adonar que el mecanisme de transport es mou en un punt fix de l'espai tridimensional, aspira el vidre a través de la ventosa, primer es mou lateralment a l'eix X, després gira 90 graus fins a la posició designada i després mou cap amunt. i cap avall a l'eix Y. Després d'arribar a la posició establerta, deixeu anar el vidre i col·loqueu-lo al prestatge de vidre. L'estabilitat estructural de tot el dispositiu és molt alta, la qual cosa millora molt la manipulació. eficiència.

Hora de publicació: 18-mar-2024



